







 |
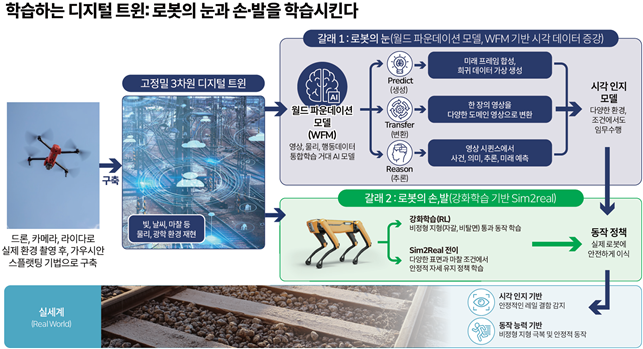
| 자율 선로점검 로봇 학습 구조도 / 철도연 제공 |
[대한경제=장진우 기자] 한국철도기술연구원(원장 사공명)은 자율 점검 로봇이 실제 철도 선로 현장에서 작동할 수 있도록 하는 ‘철도 특화 로봇 기반 선로점검 핵심기술 개발’에 착수했다고 22일 밝혔다.
연구의 핵심은 자율 점검 로봇이 다양한 선로 환경과 위험 상황을 가상으로 반복 학습하도록 가상 철도 환경(디지털 트윈)을 ‘동적 학습장’으로 활용하는 것이다. 이에 따라 예방적ㆍ자율적 철도 유지보수 체계로의 전환이 가능할 거라는 전망이 나온다.
철도연은 선로 점검 과정에서 인공지능(AI) 학습에 필요한 결함 사례를 충분히 확보하거나, 위험 상황을 실제 현장에서 반복 실험하기 어렵기 때문에 일종의 가상공간을 구축했다고 설명했다. 실제 선로와 주변 환경을 드론ㆍ카메라ㆍ라이다로 수집해 3차원 가상공간을 만든 뒤, 로봇의 시각 인지와 이동 제어를 학습시키는 디지털 학습장으로 활용한다는 것이다.
디지털 학습장에서는 현실 세계처럼 선로 침입ㆍ장애물 등 각종 돌발 변수와 폭설ㆍ폭우 등 기상, 야간ㆍ역광 등 환경, 자갈ㆍ비탈면과 같은 지형을 적용할 수 있어 다양한 조건에서 학습이 가능하다.
연구 책임을 맡은 변성준 철도연 선임연구원은 “자율 점검 로봇의 성능은 얼마나 정확하게 보고, 안정적으로 움직이느냐에 달려있다”며 “이번 연구는 월드 파운데이션 모델로 로봇의 시각 인지 능력을 높이고, 강화학습과 심투리얼(Sim2Real) 기술을 통해 실제 선로 환경에서도 안정적으로 이동할 수 있는 제어 정책을 확보하는 것이 핵심”이라고 말했다.
장진우 기자 camel@
〈ⓒ 대한경제신문(www.dnews.co.kr), 무단전재 및 수집, 재배포금지〉

